
It’s the time of year for saving money!
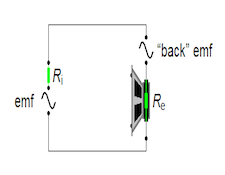
Thus far in this continuing series about loudspeaker performance and dynamic compression, I’ve said that speakers (loudspeaker “drivers”, actually) are not nearly as simple as they may seem; that their operation consists of back-and-forth movement powered and directed by the changing audio signal driving them; that that signal starts the moving part of the driver (the “diaphragm”) moving and, both by the normal variations in polarity and amplitude of the audio signal and in response to “back EMF” from uncontrolled diaphragm movement resulting from the amplifier’s “damping factor”, also helps to stop the diaphragm from unwanted movement.
 Even so, I wrote, that excessive travel (“overshoot”) will always be present beyond a certain range of diaphragm velocity because the force applied by the mechanical elements of the driver (the “spider” and the “surround”), which act as springs to control diaphragm movement, is linear and ARITHMETIC (twice or half as much movement creates twice or half as much resistance) in accordance with Hook’s Law, while the force NECESSARY to control the diaphragm is EXPONENTIAL (increasing or decreasing as the SQUARE of the increase or decrease in diaphragm velocity).
Even so, I wrote, that excessive travel (“overshoot”) will always be present beyond a certain range of diaphragm velocity because the force applied by the mechanical elements of the driver (the “spider” and the “surround”), which act as springs to control diaphragm movement, is linear and ARITHMETIC (twice or half as much movement creates twice or half as much resistance) in accordance with Hook’s Law, while the force NECESSARY to control the diaphragm is EXPONENTIAL (increasing or decreasing as the SQUARE of the increase or decrease in diaphragm velocity).
Put most simply, with the driver’s ability to mechanically control its diaphragm increasing only linearly, while the force necessary to control it increases exponentially with increasing velocity, the louder (or the higher frequency or both) a driver is playing, the less likely it will be to be able to fully control its diaphragm, and the greater will be the likelihood of lost signal information and dynamic compression.
Even that isn’t all of it, though: Consider that a spring is ALWAYS a spring, so that as the diaphragm tries to move forward or backward from its center (“rest”) position, it is always, to a degree directly proportional to its distance from the center position, being HELD BACK FROM exactly following the incoming audio signal. And then, after it has stopped and turned around (after whatever amount of overshoot, which will, itself, contribute to the extension and resultant resistance of the spring elements) the spring force will HELP the incoming signal to accelerate the diaphragm up to – or possibly even PAST — the necessary velocity for its return to the center position. And that’s where it gets even more complicated: Because inertia can cause the diaphragm to continue (whether powered to do so or not) past the point where the signal would direct it to stop, that inertial force can (perhaps) provide un-directed impetus (beyond that supplied by the incoming audio signal) for the diaphragm’s next movement following the signal (which will, of course be resisted by the spring elements of the driver to a degree determined by the diaphragm’s velocity.)
 The result of all this is, as you can see, a condition of inconsistent asymmetrical response to the input signal where, depending on what the just preceding movement was; to what degree and over what distance it was; and at what effective velocity it was; the spring elements of the driver may either assist or resist the diaphragm in moving to follow its driving signal.
The result of all this is, as you can see, a condition of inconsistent asymmetrical response to the input signal where, depending on what the just preceding movement was; to what degree and over what distance it was; and at what effective velocity it was; the spring elements of the driver may either assist or resist the diaphragm in moving to follow its driving signal.
And it gets even stranger: Until this point, I’ve talked almost exclusively about overshoot – what happens when a driver’s diaphragm continues to move past the point where the signal driving it has stopped or changed direction. That happens because of inertia, one aspect of which is the tendency of an object in motion to continue in motion, changing neither direction nor velocity except in response to some external force. That is certainly correct and directly applicable to a driver’s diaphragm, but it’s not all there is: There’s also another aspect of inertia which, while seemingly opposite to the one just stated, can have a similar effect in terms of lost information and dynamic compression: “Undershoot”, is caused by the tendency, also in accordance with Newton’s First Law of Motion, for an object at rest ― NOT moving ― to remain at rest except in response to external force. As with overshoot, it also applies to, and directly influences the sound, output, and performance of any driver that has a physical diaphragm.
Whereas with overshoot, inertia will make a driver’s diaphragm keep on moving, even after the signal driving it may have stopped, or even changed direction (polarity), with undershoot, inertia slows the diaphragm’s start in responding to the signal, and this delay results in a loss of timing integrity, softening sonic “edges” and reducing dynamic “punch”. (There’s that kick-less kick drum again.) Because, just as with overshoot, signal information is lost (much of it turning to heat) during even the very brief (milliseconds or even fractions of milliseconds) period of delay, effective power is lost, too, and, as I wrote before, a 10dB increase in signal level may result in LESS THAN a 10dB increase in output level, with the amount lost increasing as the volume level of the driving signal (both average and instantaneous) increases.
 UNLIKE overshoot, however, undershoot doesn’t throw the driver into “generator” mode. Non-motion is simply non-motion, and doesn’t result in “back EMF” and a signal from the amplifier to correct it, so once again there’s an asymmetrical effect on the driver’s motion and the resultant sound.
UNLIKE overshoot, however, undershoot doesn’t throw the driver into “generator” mode. Non-motion is simply non-motion, and doesn’t result in “back EMF” and a signal from the amplifier to correct it, so once again there’s an asymmetrical effect on the driver’s motion and the resultant sound.
There’s a fancy term that can be applied to all of this: “Hysteresis”, which is defined as “time-based dependence of a system’s output on present and past inputs” and, according to Wikipedia, “The dependence arises because the history (meaning the diaphragm’s response to past driving signal energy) affects the value of an internal state (in this case, the “helping” or “resisting” energy effects of inertia)”
That same article goes on to say that “To predict its future outputs, either its internal state or its history must be known.” Does that mean that, with speakers, too, “Knowledge is power”, and that, by knowing about the inertial or hysteresis (whichever term you prefer) effects that playing an audio signal has on the moving parts of a driver, we can anticipate and overcome them?
I really don’t know. Perhaps one of you very talented designers out there (John? Tony? Dan? Jeff? Peter? Bascom? Mark? Charlie?) can find a way to accomplish this in the digital domain, and solve the problem entirely. If you can, GO FOR IT! It might be worth a fortune to you.
In the meantime, there are speakers and drivers on the market, even today, that will help to minimize the effects that I’ve been describing, and that any audiophile – even one with a “real-world” budget – can afford to buy. I’ll write about some of them next time.





