
It’s the time of year for saving money!
In Part 1 of this new series, I wrote that even though speakers seem to be pretty simple devices, doing what they’re supposed to do is really not very simple at all: Although any loudspeaker is really just a diaphragm and a motor to move it back and forth in response to an incoming audio signal, there are basic laws of physics that make it virtually impossible for any speaker (from this point on, let’s call them “drivers”) with a physical diaphragm to accurately follow the demands of that signal throughout the entire range of required motion. (Yes, there ARE driver designs that, like the Ionovac, the Plasmatronics, and others, have no physical diaphragm at all, but they’re a different story and have their own characteristic problems) Perhaps the most important of these laws to the performance of any driver is Newton’s First Law of Motion, which describes inertia ― that property of matter which causes it to resist changes in velocity (speed and/or direction). Inertia means (among other things) that an object, once moving, will tend to continue moving forever unless it’s stopped by some external force.
 I wrote last time that, in a typical “cone” speaker, there are three things that can serve to stop the diaphragm once it’s started in motion: the incoming signal; the “spider” (the flexible “accordion-pleated” part of the speaker fixed to the cone just above the voice-coil, that centers the voice coil in the magnetic gap of the motor structure and helps to limit the forward and back movement of the cone); and the “surround”(that other flexible, rolled or accordion-pleated part of the speaker that centers the big end of the cone in the frame [“basket”‘] of the speaker and also acts to control and limit motion.) Both the spider and the surround (except in some “acoustic suspension” designs) also act as “springs”, to resist motion away from their “rest” positions and to pull the cone back to its own rest position after either forward or backward movement.
I wrote last time that, in a typical “cone” speaker, there are three things that can serve to stop the diaphragm once it’s started in motion: the incoming signal; the “spider” (the flexible “accordion-pleated” part of the speaker fixed to the cone just above the voice-coil, that centers the voice coil in the magnetic gap of the motor structure and helps to limit the forward and back movement of the cone); and the “surround”(that other flexible, rolled or accordion-pleated part of the speaker that centers the big end of the cone in the frame [“basket”‘] of the speaker and also acts to control and limit motion.) Both the spider and the surround (except in some “acoustic suspension” designs) also act as “springs”, to resist motion away from their “rest” positions and to pull the cone back to its own rest position after either forward or backward movement.
This kind of stopping mechanism has a problem, though: In order to produce sound, the diaphragm must constantly move, stop, and reverse direction, and the two factors that affect the amount of energy required to stop the diaphragm at any moment so that it can be turned around and started in the opposite direction are the MASS of the moving parts (the diaphragm, itself, plus the moving portions of the spider and the surround) and the VELOCITY at which those parts are traveling.
 The mass part is simple: For all intents and purposes, it remains constant regardless of whatever the diaphragm may be doing. It’s the velocity that creates the problems, and (to simplify things considerably) the louder or the higher in frequency (or both) a driver is playing, the greater the velocity of its diaphragm (the distance it will move in any given time period) will be. Where this becomes a problem is that while the energy required to stop the diaphragm’s movement is exponential and increases as the square of the diaphragm’s velocity, the slowing or stopping power of the spring elements is, according to Hook’s law, linear and arithmetic (directly proportional to its change in physical dimension by stretch or compression). To put this most simply, doubling the velocity will QUADRUPLE the required stopping force, while doubling the distance moved will only DOUBLE the spring tension. The more the diaphragm moves, in other words, the less controlled it will be.
The mass part is simple: For all intents and purposes, it remains constant regardless of whatever the diaphragm may be doing. It’s the velocity that creates the problems, and (to simplify things considerably) the louder or the higher in frequency (or both) a driver is playing, the greater the velocity of its diaphragm (the distance it will move in any given time period) will be. Where this becomes a problem is that while the energy required to stop the diaphragm’s movement is exponential and increases as the square of the diaphragm’s velocity, the slowing or stopping power of the spring elements is, according to Hook’s law, linear and arithmetic (directly proportional to its change in physical dimension by stretch or compression). To put this most simply, doubling the velocity will QUADRUPLE the required stopping force, while doubling the distance moved will only DOUBLE the spring tension. The more the diaphragm moves, in other words, the less controlled it will be.
What that means is that if, for example, that kick drum on your favorite recording gets a good bash and you try to play it back at high volume, the initial impact will cause your bass driver’s diaphragm to surge forward a good distance at a high velocity. This will likely cause a loss (or at least severe diminution) of control and, instead of stopping as it should when the amplifier signal driving it stops and reverses phase, the diaphragm will continue to move for some additional distance before stopping. This is called “overshoot”, and it’s the beginning of a whole series of things that you don’t want to happen: While the diaphragm is continuing to move, the signal from the amplifier is still continuing to follow the music. That means that, by the time the diaphragm is stopped and turned around, some portion of the music (that kick drum beat and all the rest of it) will have been lost, never to be recovered. This loss of signal information, even though it’s caused by a slowing of the turnaround time of the diaphragm, still happens very quickly – maybe even in just fractions of a millisecond. Even so, when it does, it results in a loss of sonic “punch” through dynamic compression and creates a situation where, even though there may be a 10dB increase in the driving signal, there’s LESS than a 10dB increase in real loudness.
 This phenomenon isn’t just limited to woofers, either – even when it’s a result of that kick drum beat. For every frequency, there are harmonics (integer multiples of the fundamental frequency) that extend at diminishing amplitude throughout the entire audible range, and some of them (unless filtered out) will appear, at whatever level and with whatever degree of dynamic compression, on ALL of the drivers of any speaker system.
This phenomenon isn’t just limited to woofers, either – even when it’s a result of that kick drum beat. For every frequency, there are harmonics (integer multiples of the fundamental frequency) that extend at diminishing amplitude throughout the entire audible range, and some of them (unless filtered out) will appear, at whatever level and with whatever degree of dynamic compression, on ALL of the drivers of any speaker system.
Inertial effects also affect (and, by “undershoot”, result in dynamic compression of) the diaphragm’s ability to accelerate back up to speed on the return part of its “back and forth” journey, but the overshoot effects seem to be more sonically significant. There is something, though, that helps the incoming audio signal, the spider, and the surround to LIMIT overshoot: Virtually every type of driver (with some possible exceptions, including electrostatics and those with no physical diaphragm) acts not only as a “motor”, to produce motion in response to an incoming electrical signal, but as a “generator”, to produce electricity in response to motion.
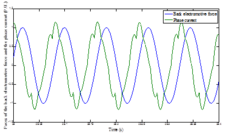
 What this means in practice is that the instant that the power from the amplifier stops and changes direction but the driver’s diaphragm continues its forward or backward movement, the driver is in its “generator” mode and will start to generate electricity instead of being driven by it. That electricity (which is called “Back Electromotive Force” or “Back EMF”) is passed down the speaker cable, back to the amplifier, which resists it to a degree determined by the amplifier’s “damping factor” and, with a current opposing the driver’s back EMF, helps to stop the diaphragm’s unwanted movement.
What this means in practice is that the instant that the power from the amplifier stops and changes direction but the driver’s diaphragm continues its forward or backward movement, the driver is in its “generator” mode and will start to generate electricity instead of being driven by it. That electricity (which is called “Back Electromotive Force” or “Back EMF”) is passed down the speaker cable, back to the amplifier, which resists it to a degree determined by the amplifier’s “damping factor” and, with a current opposing the driver’s back EMF, helps to stop the diaphragm’s unwanted movement.
There are some drivers that, even without help from the amplifier, are either less affected by dynamic compression or are better able to resist it. I’ll write a little about them next time
See you then.




